
مروری بر انکودر موتور

انکودر
انکودر یک دستگاه الکترومکانیکی است که یک سیگنال الکتریکی را برای کنترل سرعت و یا موقعیت استفاده می کند. انکودر ها حرکت مکانیکی را به یک سیگنال الکتریکی تبدیل می کنند که توسط سیستم کنترل برای نظارت بر پارامترهای خاص برنامه مورد استفاده قرار می گیرد و در صورت لزوم تنظیماتی را برای عملکرد مطلوب دستگاه انجام می دهد.
پارامترهای تحت نظارت بر اساس نوع برنامه تعیین می شوند و می توانند شامل سرعت ، مسافت ، RPM ، موقعیت ، جهت و سایر موارد باشند. سیستم هایی که از انکودر یا سایر حسگرها برای کنترل پارامترهای خاص استفاده می کنند ، اغلب به عنوان بازخورد حلقه بسته یا سیستم های کنترل حلقه بسته نامیده می شوند.
انکودر موتور
انکودر چیست
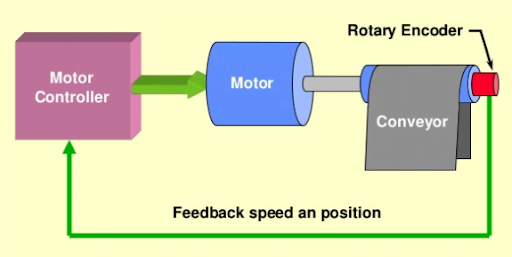
سیستم حلقه بسته
انکودر موتور یک رمزگذار دوار است که روی یک موتور الکتریکی نصب شده و با ردیابی سرعت و یا موقعیت محور موتور ، سیگنال های بازخورد حلقه بسته را ارائه می دهد. تنوع گسترده ای از انکودر ها موجود می باشد مانند انکودر افزایشی یا مطلق ، نوری یا مغناطیسی ، شفت دار یا محور یا توپی توخالی ، و سایر موارد. نوع انکودری که روی موتور مورد استفاده قرار میگیرد به عوامل مختلفی مثل نوع موتور و… بستگی دارد . رایج ترین نوع موتور عبارت است از
انکودر در موتورهای AC

انکودر در موتورهای AC
موتورهای القایی AC به دلیل مقرون به صرفه و مقاوم بودن ، برای سیستم های کنترل ماشین های اتوماسیون عمومی انتخاب های متداول هستند. انکودر ها در این موتور ها برای کنترل دقیقتر سرعت مورد استفاده می کنند استفاده می شود و اغلب مواقع نیاز به IP قوی تر ، پارامترهای ضربه و ارتعاش نیز دارند.
انکودر در سرو موتور
انکودر در سرو موتور
انکودر موتور سروو (انکودر موتورهای مغناطیس دائمی) برای سیستم های کنترل بازخورد حلقه که نیاز به دقت و صحت بیشتری دارند ارائه می شوند اما به اندازه موتورهای القایی AC قوی نیستند. انکودر موتور مورد استفاده در موتورهای سروو بسته به سطح وضوح و دقت مورد نیاز می تواند مدولار ، افزایشی یا مطلق باشد.
انکودر در استپر موتور

انکودر در استپر موتور
انکودر استپر موتور ( موتورهای پله ای ) مقرون به صرفه و دقیق هستند و معمولاً در سیستم های حلقه باز استفاده می شوند. در سیستم هایی که از موتورهای پله ای استفاده می کنند و کنترل سرعت مورد نیاز است ، یک انکودر افزایشی اغلب روی این موتور نصب می شود و به سیستم استپر موتور ( موتورهای پله ای ) اجازه می دهد تا بازخورد حلقه بسته را بدست آورد. از انکودر های استپر موتور نیز می توان در برخی از برنامه ها استفاده کرد تا امکان کنترل بهتر استپر موتور را با ارائه بازخورد دقیق موقعیت محور موتور نسبت به زاویه گام فراهم آورد.
انکودر در موتور DC
انکودرموتور DC برای بازخورد کنترل سرعت در موتورهای DC استفاده می شود. انکودر موتور DC مکانیزمی برای اندازه گیری سرعت روتور و ارائه بازخورد حلقه بسته به درایو برای کنترل دقیق سرعت ارائه می دهد.
نحوه نصب انکودر بر روی موتور
عامل بعدی که بر انتخاب رمزگذار موتور تأثیر می گذارد ، نحوه نصب انکودر است و رایج ترین گزینه ها عبارتند از :
نصب انکودر شفت دار با کوپلینگ

نصب انکودر شفت دار
نصب انکودر شفت دار با کوپلینگ
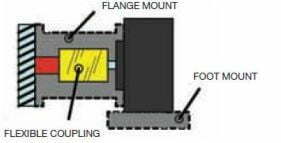
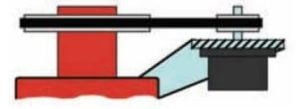
برای نصب انکودر شفت دار به دو رابط خاص نیاز است: یک پایه انکودر و دوم اتصال از محور انکودر به محور یا باری که به موتور وصل است . پایه انکودر معمولاً یا به صورت فلنج یا پایه ایستاده است که برای اتصال انکودر به یک سطح ثابت استفاده می شود.
اتصال به محور محرک معمولاً با استفاده از یک اتصال انعطاف پذیر یا یک تسمه انجام می شود. اتصال انعطاف پذیر با استفاده از پیچ های ثابت ، محور انکودر را مستقیماً به موتور یا محور محرک متصل می کند. این عمل انکودر را از ضربه و ارتعاش و جدا می کند.
نصب انکودر از طریق یک اتصال انعطاف پذیر چندین مزیت دارد.مثلا انکودر را از نویز های تولید شده بر اثر جریان های زیاد عیوری از موتور حفظ می کند . نویز های الکتریکی می تواند باعث شود که انکودر پالسی را از دست بدهد یا پالس های جعلی را تولید کند.
اتصال به محور با یک تسمه
کوپل های انعطاف پذیر مزایای مکانیکی را ارائه می دهند. کوپل های انعطاف پذیر می توانند حرکت محور را جذب کرده و ناهمواری های شفت را جبران کنند .
اتصال شفت انکودر با موتور توسط کوپلینگ نیاز به هم ترازی پیچیده ای دارد تا از آسیب به اتصال جلوگیری شود. در نتیجه ، این روش زمان و پیچیدگی نصب را افزایش می دهد. انکودر های توخالی Hollow-shaft و انکودر های توپی hub-shaft بدون نیاز به کوپلینگ ، گزینه جایگزین می باشند .
نصب مستقیم انکودر با شفت تو خالی Hollow-shaft و شفت توپی hub-shaft

نصب مستقیم انکودر با شفت تو خالی
انکودر با شفت تو خالی Hollow-shaft دارای یک شفت توخالی هستند که آنها را قادر می سازد مستقیماً بر روی محور موتور نصب شده و با استفاده از گیره متحدالمرکز به شفت متصل شوند. در این پیکربندی نصب ، یک بازوی اتصال دهنده به بدنه موتور یا هر جسم ثابت متصل می شود تا از چرخش بدنه انکودر با محور جلوگیری کند .
نصب انکودر با شفت توپی hub-shaft شبیه به انکودر با شفت تو خالی Hollow-shaft است اما در آن شفت موتور دیگر از مرکز انکودر عبور نمی کند بلکه انکودر در انتهای شفت قرار می گیرد .
در تمام حالت های نصب مستقیم لازم است که انکودر را از جریان شفت موتور جدا کنید. زیرا جریان شفت موتور از بلبرینگ انکودر عبور کرده و به آن آسیب می رساند.
نصب مستقیم بسیار آسان تر از نصب با کوپلینگ است و دیگر نیاز به برقراری تراز بین اتصالات ندارد و حرکات ارتعاشی و لزرشی بر روی آن تاثیر نخواهد داشت و عمر انکودر را بالا می برد .
مدل حلقه ای یا C با انکودر بدون بلبرینگ
مدل حلقه ای یا C با انکودر بدون بلبرینگ
همه موتور ها دارای شفت نمی باشند و آنها را با نام موتور های بدون شفت می شناسند ، اگر می خواهید نمونه های آنرا ببینبد 3 مدل direct-drive rotary motors ( torque motors), pancake motors, or Lorentz force motors را جستجو کنید .
از آنجا که انکودر شفت دار یا انکودر با شفت تو خالی Hollow-shaft و شفت توپی hub-shaft مناسب نیستند ، برای این نوع خاص معمولاً از انکودر های حلقه ای استفاده می کنند – نوعی انکودر چرخشی که با یک سوراخ بزرگ توخالی و ارتفاع محوری کوچک مشخص می شود.
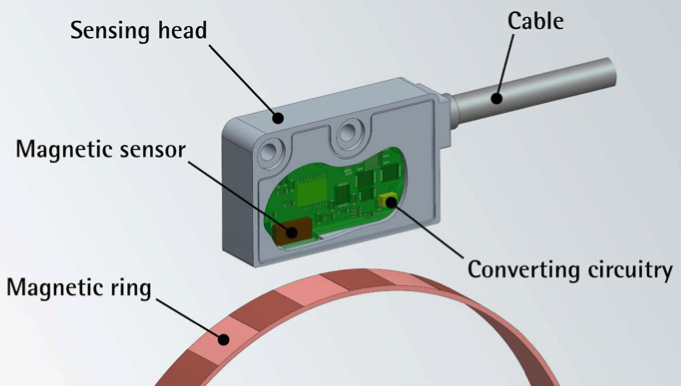
انکودر های حلقه از دو جزء تشکیل شده اند: حلقه ای که مقیاس اندازه گیری را شامل می شود و واحد اسکن که شامل حسگر و وسایل الکترونیکی است.
هرجز انکودر جداگانه نصب شده و بر خلاف سایر طرح های انکودر دوار ، رمزگذارهای حلقه نیازی به یاتاقان ندارند و کاملاً بدون تماس هستند و می توان آنرا مستقیماً در یک مفصل ربات ، یا مستقیماً روی یک موتور NEMA C-Face نصب کرد ، بنابراین می توانند با سرعت چرخشی بالاتر کار کنند و بارهای ارتعاشی و ضربه ای را تحمل کنند
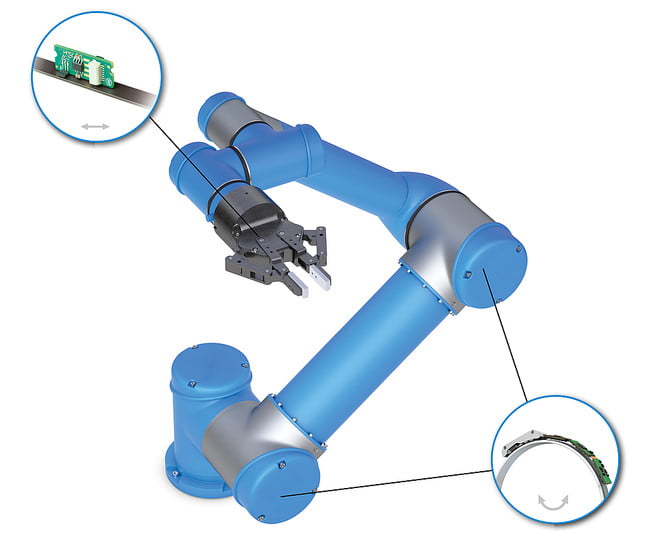
کاربرد انکودر حلقه ای در بازوی روبات
انکودر های حلقه ای دو نوع محورaxial و شعاعیradial را شامل می شوند
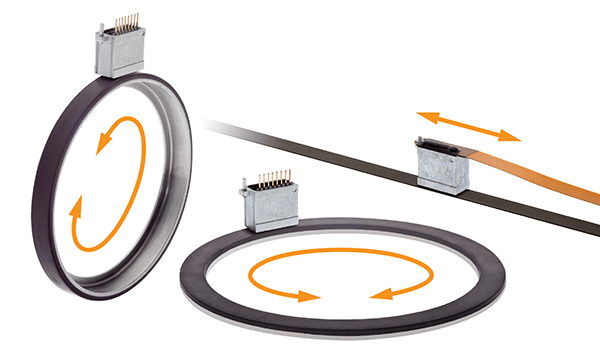
انکودر شعاعی و محوری