
موتور سنکرون رلوکتانس (SynRM)

موتورهای آهنربای دائم علی رغم دارا بودن چگالی توان بالا، به آهنرباهای کمیاب خاکی وابسته اند که دارای قیمت بسیاز زیاد بوده و نیز در برابر حرارت آسیب پذیر است. در مقابل، در موتور سنکرون رلوکتانس آهنربایی استفاده نشده و گشتاوری از جنس رلوکتانسی دارد. موتور سنکرون رلوکتانسی یک نوع موتور سنکرون بوده و تولید گشتاور در آن بر مبنای تئوری میدان دوار می باشد که در مقالات آتی بدان پرداخته می شود.
موتور سنکرون رلوکتانس
مزایای موتور سنکرون رلوکتانس
- عملکرد عالی در سرعت های بالا: بعلت عدم استفاده از سیم پیچی یا آهنربا در روتور
- قیمت ارزان: بعلت عدم استفاده از آهنربای کمیاب خاکی
- عملکرد گرمایی بسیار مناسب: بعلت عدم استفاده از آهنرباهای کمیاب خاکی، خطر مغناطیس زدایی آهنربا در دمای بالا وجود ندارد.
- راندمان بالا: با توجه به عدم وجود تحریک در روتور، راندمان موتورهای سنکرون رلوکتانس از موتورهای القایی بیشتر می باشد.
ساختار موتور SynRM
همانند سایر موتورهای موجود در صنعت، موتور سنکرون رلوکتانس نیز از دو قسمت اصلی روتور و استاتور تشکیل شده است که در ادامه بدان پرداخته می شود.
برای آشنایی با سایر موتور های الکتریکی به پست ساخت انواع موتورهای الکتریکی مراجعه کنید .
ساختار موتور سنکرون رلوکتانس
استاتور موتور سنکرون رلوکتانس
استاتور موتور SynRM مانند انواع دیگر موتورهای AC می باشد. استاتور موتور سنکرون رلوکتانس از ورق های آهن سیلیس دار تشکیل شده است که در آن تعدادی شیار برای سیم پیچی تعبیه شده است. سیم پیچی این موتورها به صورت سه فاز و توزیع شده می باشد و با جریان و ولتاژ سینوسی سه فاز تغذیه می شود. نکته قابل توجه در مورد موتورهای سنکرون رلوکتانس این است که برعکس موتورهای القایی خود راه انداز نبوده و به یک درایور کنترل دور نیاز دارد.

استاتور موتور سنکرون رلوکتانس
روتور موتور سنکرون رلوکتانس
همان طور که در قسمت پیشین بیان شد، روتور موتور سنکرون رلوکتانس بدون هرگونه سیم پیچی تحریک و یا آهنربا است و صرفا از ورق های آهن سیلیس دار تشکیل شده است. به منظور ایجاد خاصیت رلوکتانسی، درون روتور از چند دسته موانع شار استفاده شده است. تعداد دسته های موانع شار با تعداد قطب های موتور برابر است. به طور مثال در یک موتور چهار قطب چهار دسته مانع شار عین هم وجود دارد که با زاویه 90 درجه نسبت به هم توزیع دارند. طراحی و شکل موانع شار در بازدهی و سر و صدای موتور تاثیر گذار است و از پارامترهای مهم در بهینه سازی موتورهای سنکرون رلوکتانس به شمار می رود.

روتور موتور سنکرون رلوکتانس
کاربرد موتور سنکرون رلوکتانس
امروزه موتورهای القایی در حال جایگزین شدن با موتورهای سنکرون رلوکتانس هستند؛ چراکه این موتورها نسبت به موتورهای القایی دارای راندمان بالاتر و نیز حجم و وزن کمتری هستند. لذا در آینده ای نزدیک برای کابردهایی نظیر فن و پمپ از موتورهای SynRM استفاده خواهد شد. هم اکنون شرکت ABB به تولید انبوه موتور و درایور سنکرون رلوکتانس برای کاربردهای صنعتی و جایگزینی آن با موتورهای القایی پرداخته است. شایان ذکر است هم اکنون تحقیقات گسترده ای برای بکارگیری موتور سنکرون رلوکتانس در موتور سیکلت و خودروهای برقی در حال انجام است.
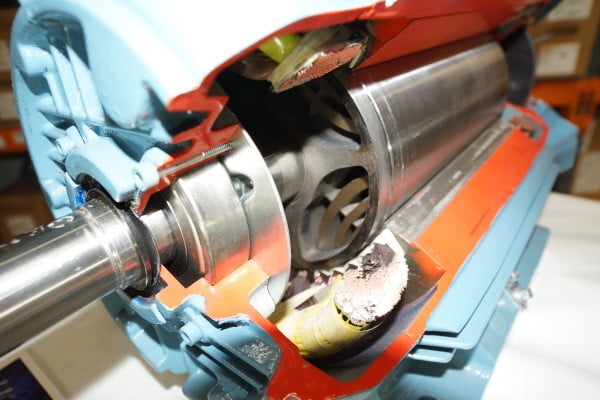
موتور سنکرون رلوکتانس با آهنربای کمکی (PM Assisted SynRM)
همانطور که در قسمت قبل گفته شد، موتورهای سنکرون رلوکتانس از آهنربا در روتور استفاده نمی کنند. اما می توان با بکارگیری حجم محدودی آهنربا در روتور، به گشتاور بیشتری دست یافت. در حقیقت با اضافه کردن آهنربا، علاوه بر گشتاور رلوکتانسی، گشتاور سنکرون که ناشی از تقابل شار آهنربا و شار استاتور است نیز تولید می شود. لذا موتور سنکرون رلوکتانس با آهنربای کمکی نسبت به موتور سنکرون رلوکتانس معمولی دارای چگالی توان بیشتری است که این امر بکارگیری آن را در خودروی برقی جذاب می سازد. امروزه کمپانی معروف تسلا در خودروی مدل 3 خود از موتور سنکرون رلوکتانس با آهنربای کمکی استفاده می کند.
ساختار موتور PM Assisted SynRM
ساختار موتور سنکرون رلوکتانس با آهنربای کمکی نیز همانند سایر موتورهای الکتریکی معمول دارای دو قسمت اصلی استاتور و روتور می باشد که در زیر به توصیف هریک می پردازیم.
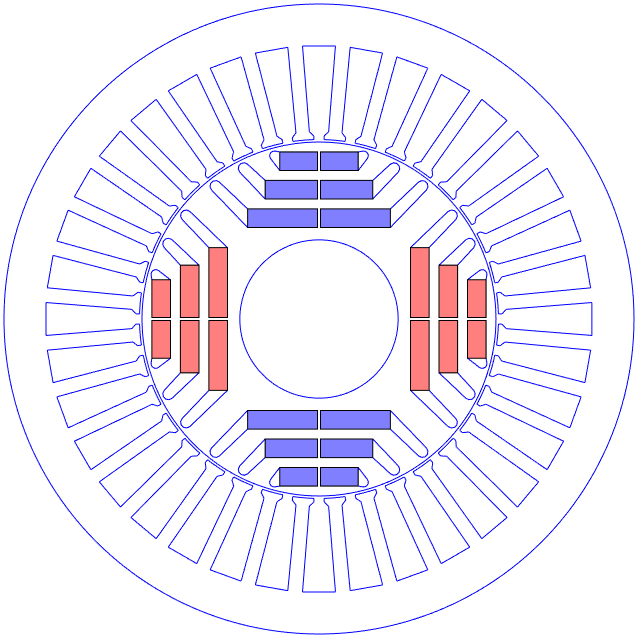
شماتیک دو بعدی از ساختار موتور سنکرون رلوکتانس با آهنربای کمکی
استاتور سنکرون رلوکتانس با آهنربای کمکی
ساختار استاتور و سیم پیچی موتور سنکرون رلوکتانس با آهنربای کمکی عینا مانند موتور سنکرون رلوکتانس معمولی می باشد. هردو موتور دارای سیم بندی سه فاز با سیم پیچی توزیع شده بوده و با منبع سه فاز سینوسی تغذیه می شوند.
روتور سنکرون رلوکتانس با آهنربای کمکی
همانطور که در قسمت پیشین گفته شد، روتور موتور سنکرون رلوکتانس معمولی دارای دسته هایی از موانع شار بوده که وظیفه ایجاد رلوکتانس و هدایت شار را به عهده دارد. در روتور موتور سنکرون رلوکتانس با آهنربای کمکی، در همه و یا تعدادی از این موانع شار حجم محدودی از آهنربای کمیاب خاکی جاسازی می شود. با توجه به مدفون شدن آهنربا درون روتور، امکان کنده شدن آن بر اثر نیروی گریز از مرکز در سرعت های زیاد وجود ندارد و لذا برای کاربردهای سرعت بالا نیز مناسب خواهد بود.
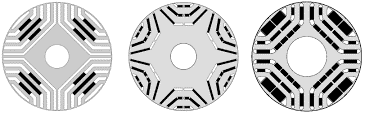
شماتیک دوبعدی از ساختار تعدادی روتور موتور سنکرون رلوکتانس
درایو موتور سنکرون رلوکتانس
همانطور که در قسمت های پیشین بیان شد، موتور سنکرون رلوکتانس نیز مانند سایر موتورهای سنکرون و آسنکرون از یک منبع سینوسی سه فاز تغذیه می شود. برای راه اندازی و کنترل دور موتورهای سنکرون و آسنکرون نیاز به یک درایو است که ما بین تغذیه و ترمینال های موتور قرار می گیرد. در واقع این درایورها با استفاده از دامنه و فاز و همچنین فرکانس خروجی، سرعت و گشتاور موتور را کنترل می کنند. معمولا برای کنترل دور موتورهای سنکرون از یکی از الگوریتم های ” کنترل برداری (FOC)” یا “کنترل مستقیم گشتاور (DTC)” استفاده می شود. درایو موتورهای سنکرون و آسنکرون می تواند به دو صورت بدون سنسور و با سنسور باشد.
کنترل سرعت با استفاده از سنسور موقعیت
برای پیاده سازی الگوریتم های کنترل دور موتورهای سنکرون، نیاز به تعیین موقعیت لحظه ای روتور می باشد. لذا برای کنترل دور این موتورها عموما از یک شفت انکودر که به شفت موتور کوپل شده است و یا از resolver استفاده می شود. شفت انکودر و resolver هردو سنسور تعیین موقعیت اند و بسته به کاربرد از یکی از آن ها استفاده می شود. resolver یک دستگاه آنالوگ بوده با استفاده از تحلیل دو ولتاژ سینوسی و کسینوسی (خروجی آن) موقعیت روتور را تعیین می کند اما انکودر یک تجهیز دیجیتال است و دقت بیشتری از resolver دارد. resolver دستگاهی بسیار مقاوم بوده و برای محیط های سخت که در معرض دمای بالا و همچنین شوک و ضربات مکانیکی است مناسب تر است. در مقاله های آتی به معرفی و تحلیل انواع انکودرها و resolver خواهیم پرداخت.

نمایی از انواع سنسور تعیین موقعیت (انکودرها و resolver)
کنترل سرعت بدون سنسور موقعیت
از آنجایی که سنسورهای موقعیت همواره در معرض خرابی هستند و قابلیت اطمینان سیستم را کاهش می دهند، الگوریتم هایی برای کنترل سرعت بدون سنسور شکل گرفته است. لازم به ذکر است در اینجا نیز برای کنترل دور موتور نیاز به تعیین موقعیت لحظه ای روتور است اما این کار بجای استفاده از سنسور موقعیت، از طریق پایش ولتاژ و جریان لحظه ای موتور و استفاده از الگوریتم های تخمین موقعیت انجام می شود. یکی از چالش های کنترل دور بدون سنسور زمانی است که موتور در سرعت های بسیار پایین کار می کند. در این وضعیت، دامنه ولتاژ و جریان موتور آنقدر پایین است که به راحتی نویز پذیر خواهد بود و موجب کاهش محسوس دقت در تخمین موقعیت می شود. لازم به ذکر است درایو های موجود در بازار قابلیت کنترل سرعت در هر دو حالت با و بدون سنسور تعیین موقعیت را دارا هستند.
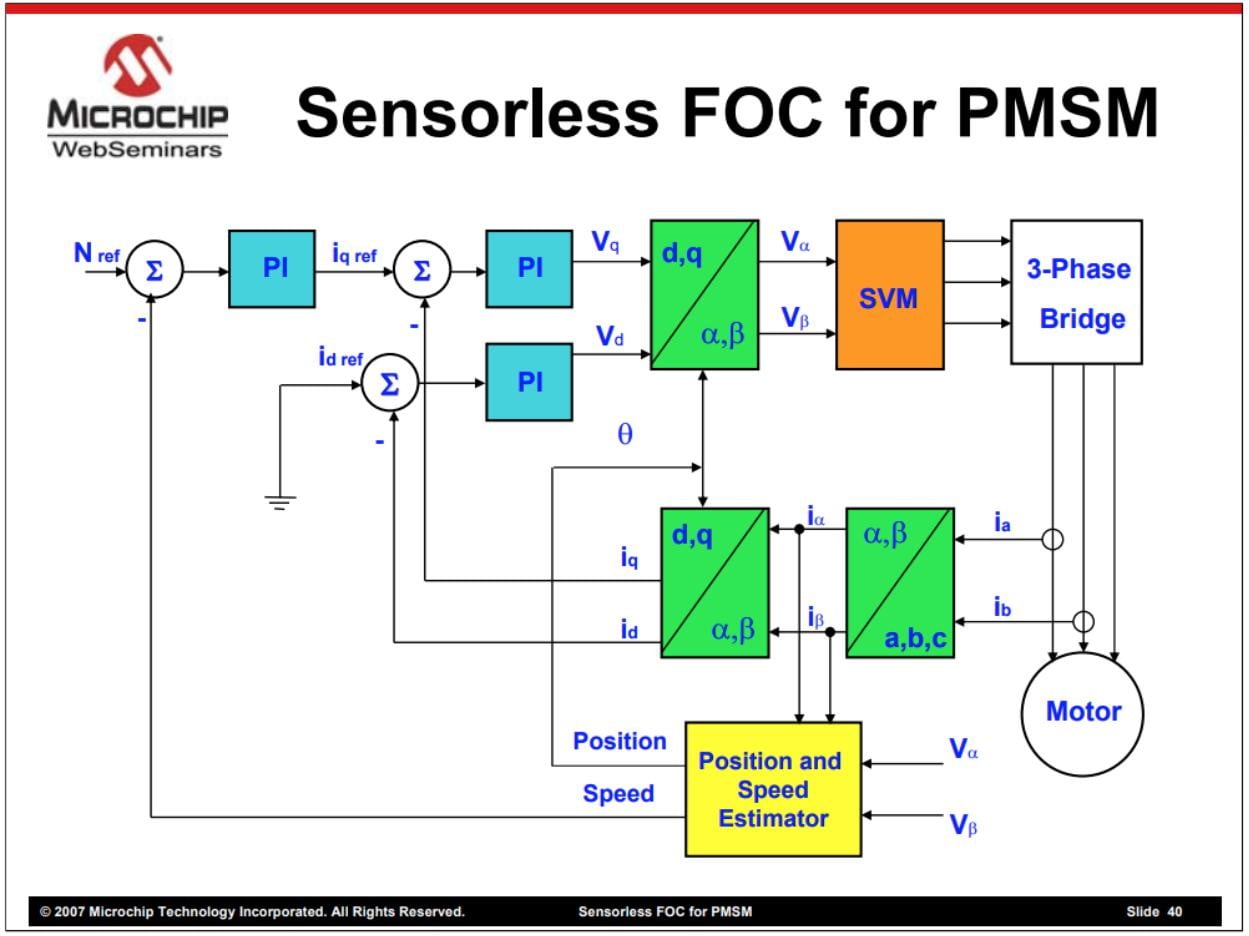
بلوک دیاگرام کنترل سرعت موتور سنکرون به روش کنترل برداری بدون سنسور موقعیت
ما چه موتورهایی می سازیم؟
این مجموعه قادر به طراحی و ساخت انواع موتورهای الکتریکی معرفی شده در بالا برای مصارف صنعتی و نیز سایر ماشین های الکتریکی نوین با اهداف تحقیقاتی و دانشگاهی می باشد. علاوه براین، ما قادر به ساخت انوع درایو برای کنترل سرعت موتورهای DC و AC نیز می باشیم. تعدادی از انواع موتورهای الکتریکی ساخته شده توسط این مجموعه در انتهای پست ساخت انواع موتورهای الکتریکی آمده است . موتورها و درایوها در این مجموعه با توجه به مشخصاتی نظیر توان نامی، حداکثر توان کوتاه مدت، سرعت نامی، حداکثر سرعت، نوع کاربری و محیط نصب طراحی و … ساخته می شوند.
جهت ثبت سفارش و مشاوره با شماره 09117901373 تماس بگیرید و یا به صفحه تماس با ما مراجعه کنید .

