ساخت انواع موتورهای الکتریکی

در این مقاله قصد داریم به معرفی انواع موتورهای الکتریکی موجود در صنعت و توانایی این مجموعه برای طراحی و نمونه سازی موتورهای الکتریکی بپردازیم.
عموما موتورهای الکتریکی موجود در صنعت به سه دسته موتورهای DC، موتورهای القایی، و موتورهای بدون جاروبک جریان مستقیم یا به اختصار BLDC تقسیم بندی میشوند. هرچند انواع مختلفی از موتورهای الکتریکی نظیر موتور شار سوئیچ شونده (FSPM)، موتور سوئیچ رلوکتانس (SRM)، موتور سنکرون رلوکتانس (SynRM)، موتور BLDC شار محوری و … نیز وجود دارد، اما موتورهای بکار گرفته شده در صنعت کشور ایران عموما به همین سه نوع تقسیم بندی می شود.
لذا در این مقاله به معرفی این سه دسته موتور و نیز تعدادی از انواع دیگر موتورهای الکتریکی خواهیم پرداخت.

ساخت موتور سنکرون رلوکتانس
انواع موتورهای الکتریکی
موتور جریان مستقیم (DC Motor)
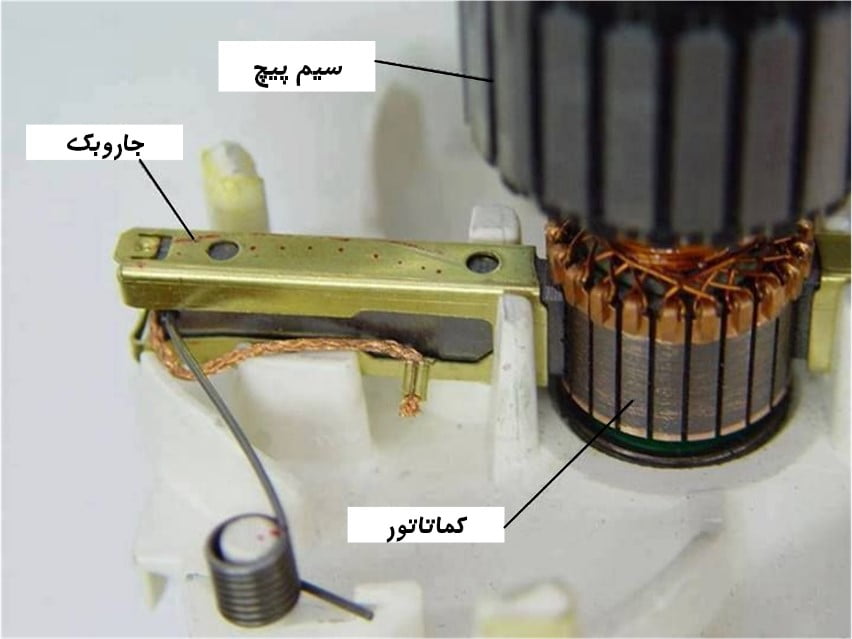
موتور جریان مستقیم قدیمی ترین موتور مورد استفاده در صنعت می باشد که هنوز هم در برخی صنایع مورد استفاده قرار می گیرد. ساختار این موتور شامل استاتور، روتور، تیغه کماتاتور و جاروبک (زغال) می باشد. استاتور این موتور که ساکن می باشد وظیفه تحریک و ایجاد شار در فاصله هوایی را دارد. لذا استاتور موتور DC یا به صورت سیم پیچی شده و یا به صورت آهنربای دائم می باشد که در حالت دوم به این موتور PMDC اطلاق می شود. در شکل زیر نمایی از موتور DC با استاتور سیم پیچی شده و موتور DC با تحریک آهنربا (PMDC) را مشاهده می کنید. در موتورهای DC سیم پیچی آرمیچر بر روی روتور قرار گرفته است که در حال چرخش است. سرسیم های آرمیچر به تیغه های مسی مجزا که کماتاتور نامیده می شوند متصل شده است. با چرخش روتور، جریان تغذیه توسط زغال های ساکن به کماتاتور و سپس به آرمیچر تزریق می شود.

موتورهای DC با استاتور سیم پیچی شده و استاتور آهنربای دائم
معایب موتور جریان مستقیم (DC Motor)
امروزه استفاده از موتورهای DC بسیار محدود شده است و روز به روز از محبوبیت آن کاسته می شود. دلایل این موضوع به قرار زیر می باشد:
- استفاده از جاروبک و کماتاتور موجب افزایش نیاز به تعمیر و نگهداری و نیز طول عمر کم موتورهای DC می شود. علاوه بر این، حین عبور جاروبک از یک تیغه کماتاتور به تیغه دیگر، جرقه تولید می شود که خطر آتش سوزی را در محیط های اشتعال پذیر بدنبال دارد.
- با توجه به اینکه سیم پیچی آرمیچر بر روی روتور قرار گرفته است، روتور موتور DC بسیار سنگین و حجیم بوده و لذا دارای اینرسی بالایی است. لذا موتورهای DC لخت و غیر چابک اند.
- موتورهای DC دارای تلفات زیادی در قسمت جاروبک، کماتاتور و تحریک بوده و لذا نسبت به سایر موتورها دارای راندمان کمتری هستند.

اجزای روتور موتور DC
موتور القایی (Induction Motor)
موتور القایی در حال حاضر رایج ترین موتور مورد استفاده در صنعت می باشد و در زمره موتورهای جریان متناوب (AC) قرار می گیرد. این موتورها معمولا به صورت تکفاز و یا سه فاز مورد استفاده قرار می گیرند. موتورهای القایی تکفاز نسبت به موتورهای سه فاز دارای راندمان کمتر و سر و صدای بیشتری هستند و اغلب در توان های کمتر از 1 اسب (حدودا 750 وات) مورد استفاده می شوند. با متصل نمودن استاتور به ولتاژ متناوب (AC) یک میدان مغناطیسی دوار در فاصله هوایی ایجاد می شود که با سرعت سنکرون دوران می کند. این میدان دوار سبب القای جریان در روتور می شود و طبق قانون لنز به روتور گشتاوری اعمال می شود تا با سرعت میدان استاتور هم سرعت شود (میدان متغیری را تجربه نکند). لذا در یک موتور القایی روتور با سرعتی بسیار نزدیک به سرعت سنکرون دوران می کند و البته با افزایش گشتاور بار، سرعت روتور کاهش می یابد.

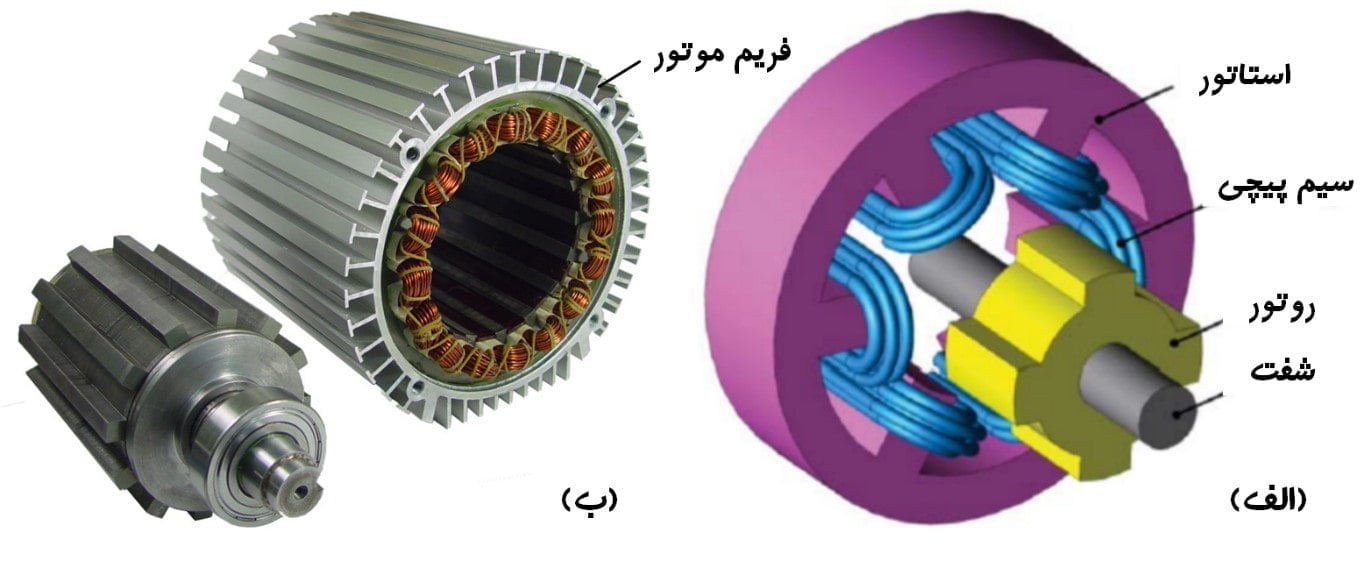
نمای برش خورده یک موتور القایی سه فاز
ساختمان موتورهای القایی رایج
دو توع موتور القایی رایج وجود دارد؛ موتور القایی با روتور قفس سنجابی و موتور القایی با روتور سیم پیچی شده. مطابق شکل زیر موتور القایی قفس سنجابی از یک استاتور با سیمپیچی و یک روتور با میلههای قفس تشکیل شدهاست، میلههای قفس توسط دو حلقهی انتهایی اتصال کوتاه شدهاند. دو بلیرینگ بر روی شفت در دو طرف برای نگهداری روتور و یک قاب با دو درپوش انتهایی برای نگهداری موتور قرار گرفتهاند. مطابق شکل زیر روتور سیم پیچی شده از سیم پیچی سه فاز و هسته آهن تشکیل شده است. ترمینال سیم بندی سه فاز به سه حلقه لغزان (اسلیپ رینگ) متصل بوده که توسط سه جاروبک به یک مدار مقاومتی سه فاز متصل می شود. استفاده از مقاومت خارجی در روتور بدلیل افزایش گشتاور راه اندازی موتور می باشد. پس از راه اندازی کامل، این مقاومت ها از مدار خارج می شوند. معمولا موتورهای مورد استفاده در صنعت از نوع قفس سنجابی هستند چرا که نیاز به تعمیر و نگهداری کمتری دارند. همانطور که در قسمت قبل بیان شد اساس کارکرد موتورهای القایی ایجاد یک میدان دوار توسط استاتور است. از آنجا که میدان دوار در یک سیستم دو یا سه فاز تشکیل می شود، لذا موتورهای تکفاز برای عملکرد نیازمند تمهیدات ویژه ای هستند. بهمین دلیل برای بکار انداختن موتور القایی به صورت تکفاز بایستی علاوه بر فاز اصلی یک فاز فرعی ایجاد نمود تا سیستم تکفاز به سیستم دوفاز شبیه شود. بدین منظور موتورهای القایی تکفاز از انواع مختلفی نظیر موتور با خازن دائمی، خازن راه انداز، موتور فاز شکسته و موتور با قطب چاکدار می باشند که در مقاله ای جداگانه به شرح عملکرد هریک می پردازیم.
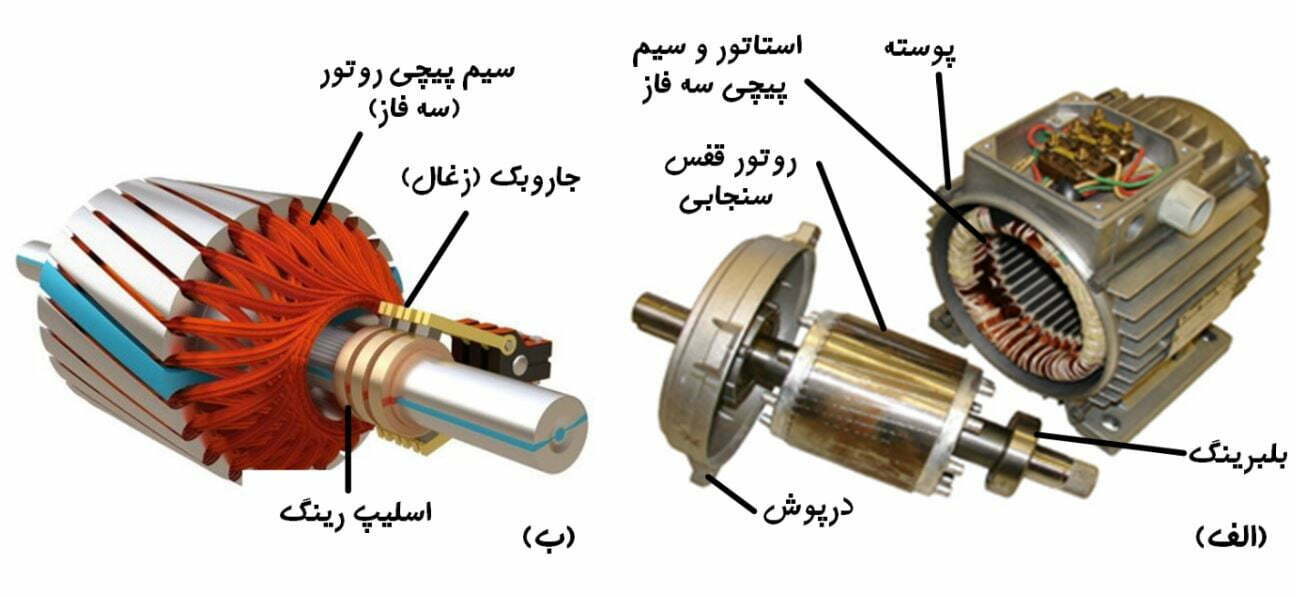
موتورهای القایی با روتور قفس سنجابی و روتور سیم پیچی شده
موتور بدون جاروبک جریان مستقیم- براشلس (BLDC Motor)
امروزه، ماشینهای آهنربای دائم بدون جاروبک جایگزین ماشینهای القایی شدهاند. در موتورهای BLDC شار مغناطیسی توسط آهنربا که در روتور قرار گرفته است تولید می شود و سیم پیچی و قفس در روتور وجود ندارد. مهمترین مزایای آنها به شرح زیر است:
- با توجه به تولید میدان مغناطیسی به وسیله آهنرباهای دائم، وزن و حجم موتور کم بوده و لذا موتور دارای چگالی توان زیادی است.
- بدلیل عدم وجود تلفات مسی در روتور، این موتورها دارای راندمان بالایی هستند.
- با توجه به این موضوع که گرمای موتور عموما در استاتور تولید می شود، این گرما به آسانی به محیط منتقل شده و عمل خنک سازی را آسان تر می کند.
- بعلت عدم وجود هادی حامل جریان و نیز جاروبک و کماتاتور در روتور، این موتورها ذاتا قابلیت اطمینان بالاتری دارند.
- با توجه به عدم وجود سیم پیچی در روتور، این موتورها دارای ثابت زمانی الکترومکانیکی پایینی بوده و لذا موتورهای چابکی بوده و پاسخ دینامیکی سریعی دارند.

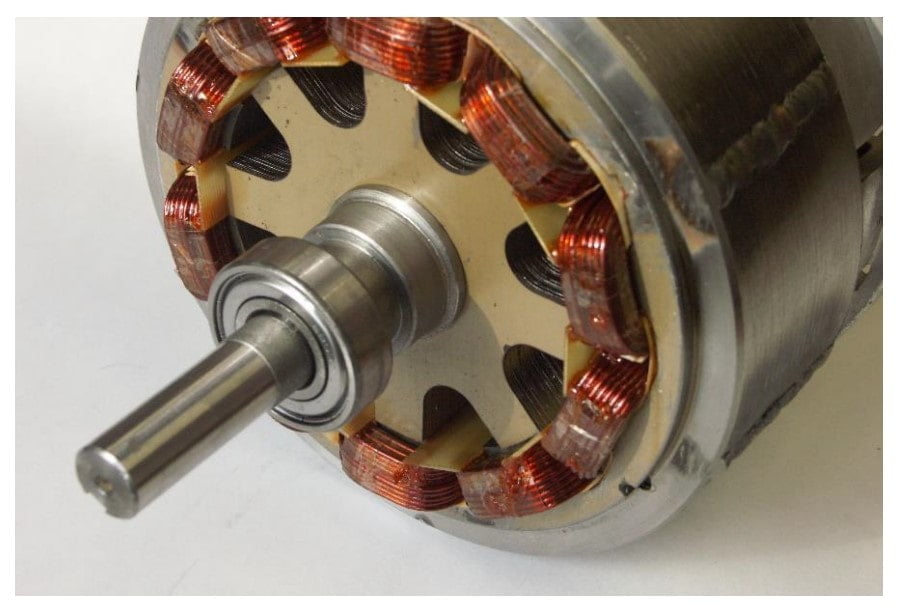
نمایی از یک موتور براشلس
اجزای موتورهای براشلس
موتورهای BLDC در صنعت به صورت تک فاز، دوفاز و سه فاز یافت می شوند اما نوع سه فاز آن در صنعت متداول ترین است. بسته به موقعیت نسبی روتور و استاتور، موتورهای BLDC به دو دسته روتور بیرونی و روتور داخلی که به ترتیب در شکل زیر قابل ملاحظه اند تقسیم بندی می شوند. در موتور BLDC با روتور خارجی فضای بیشتری برای کنار هم چیدن آهنرباها در دسترس است و لذا معمولا موتورهای BLDC با تعداد قطب زیاد از نوع روتور بیرونی اند. در مقابل، موتور BLDC روتور داخلی معمولا در موتورهای با تعداد قطب کم مورد استفاده قرار می گیرد. از آنجا که برای تحریک فازهای موتور BLDC نیاز به دانستن موقعیت لحظه ای روتور است، معمولا از سه سنسور اثر هال استفاده می شود که در شیارها یا دندانه های استاتور تعبیه شده اند. لازم به ذکر است که موتورهای BLDC برای کارکرد به یک درایور نیازدارند که موجب می شود گستره وسیعی از سرعت ها و گشتاورها تامین شود.
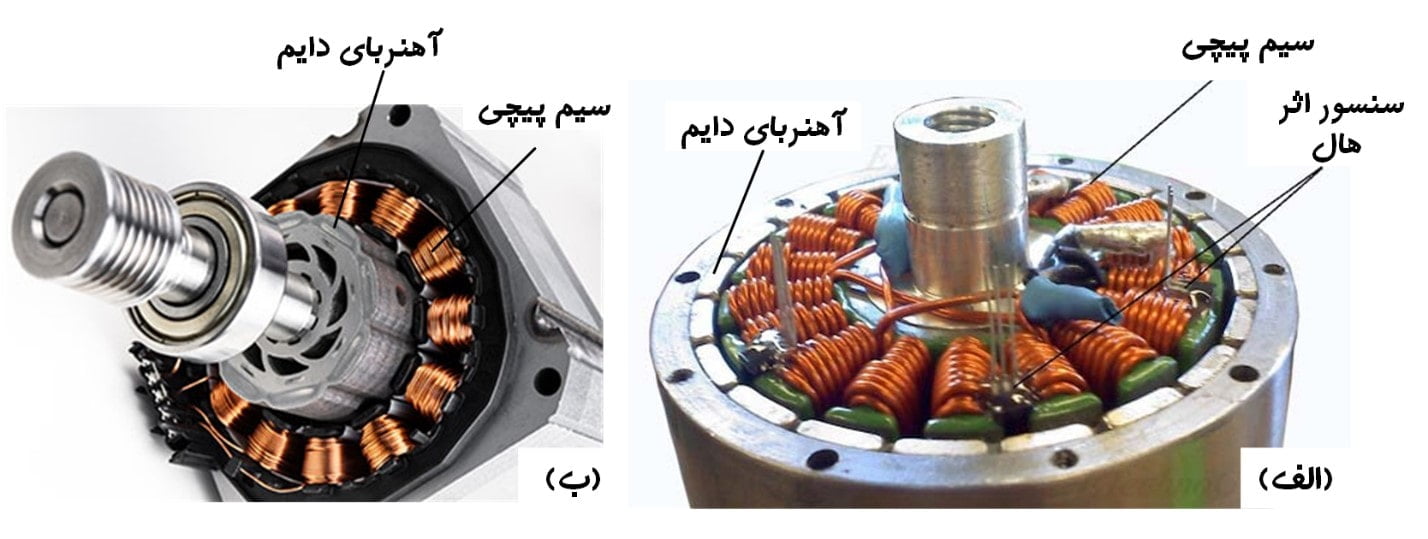
موتورهای BLDC روتور بیرونی و روتور داخلی با آهنربای سطحی و دفنی
موتور سوئیچ رلوکتانس (SRM)
موتور سوئیچ رلوكتانس (SRM) موتوري است که تنها یک تحریک در استاتور داشته و روتور آن به صورت قطب برجسته و بدون هرگونه سیم پیچی و یا آهنرباست. با توجه به اینکه بر روي روتور هيچ سيم پيچي و آهنربا وجود ندارد و تنها از آهن سیلیس دار ساخته می شود، موتور سوئیچ رلوکتانس دارای ساختاری ساده و ارزان با قابليت اطمينان بالا است. همانند موتور BLDC، موتورهای SRM نیز برای کارکرد به درایور نیاز دارند و گستره وسیعی از سرعت ها قابل دستیابی است. معمولا در موتورهای SRM به منظور تعیین موقعیت روتور از سه سنسور نوری استفاده می شود که روی درپوش موتور نصب می گردد.
موتور سوئیچ رلوکتانس
ساختمان موتورهای سوئیچ رلوکتانس
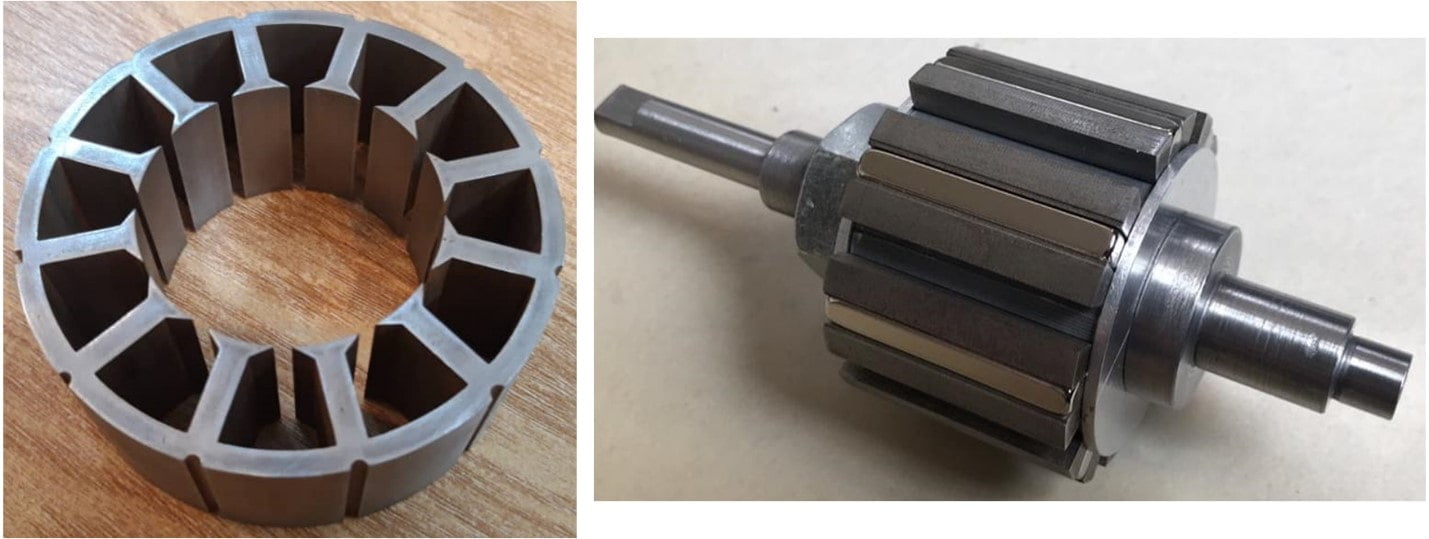
شماتیک یک موتور SRM سه فاز با 4 قطب روتور و 6 قطب استاتور که به اختصار موتور 4/6 نامیده میشود در شکل زیر قسمت الف به نمایش درآمده است. همچنین نمای واقعی از یک موتور SRM چهار فاز 12/16 در شکل زیر قسمت ب نشان داده شده است. یکی از معایب موتورهای سوئیچ رلوکتانس ریپل (نوسان) زیاد گشتاور می باشد. بدین منظور برای دستیابی به ریپل گشتاور کمتر، می توان تعداد فازهای موتور را افزایش داد. در مقالات آتی نحوه عملکرد و درایو موتور سوئیچ رلوکتانس را شرح خواهیم داد.
موتور سوئیچ رلوکتانس (SRM) سه فاز 4/6 و چهار فاز 12/16
موتور سنکرون رلوکتانس (SynRM)
در سال های اخیر گرایش به سمت موتورهای الکتریکی سنکرون رلوکتانس بدلیل افزایش قیمت آهنربا و خصوصیت های مناسب آن نظیر ریپل گشتاور کم، ساختار ساده و چگالی توان بالا به طور چشمگیری افزایش یافته است. هم اکنون شرکت ABB به تولید انبوه موتور و درایو سنکرون رلوکتانس روی آورده و در صدد جایگزینی آن با موتورهای القایی است چراکه موتورهای سنکرون رلوکتانس دارای بازدهی بیشتر و حجم و وزن کمتری هستند.

موتور-درایو سنکرون رلوکتانس ساخت شرکت ABB
اجزای موتور سنکرون رلوکتانس (SynRM)
شماتیک دو بعدی از اجزای موتور سنکرون رلوکتاس در شکل زیر نشان داده شده است. استاتور و سیم پیچی آن عینا مانند یک موتور القایی است. اما روتور آن بدون هرگونه سیم پیچی و یا آهنربا می باشد. در درون روتور مسیرهایی خالی شده است که بدان موانع شار (Flux Barrier) گفته می شود و وظیفه آن ایجاد خاصیت رلوکتانسی در روتور است. در شکل زیر قسمت ب یک نمای واقعی از موتور سنکرون رلوکتانس (SynRM) را مشاهده می نمایید.
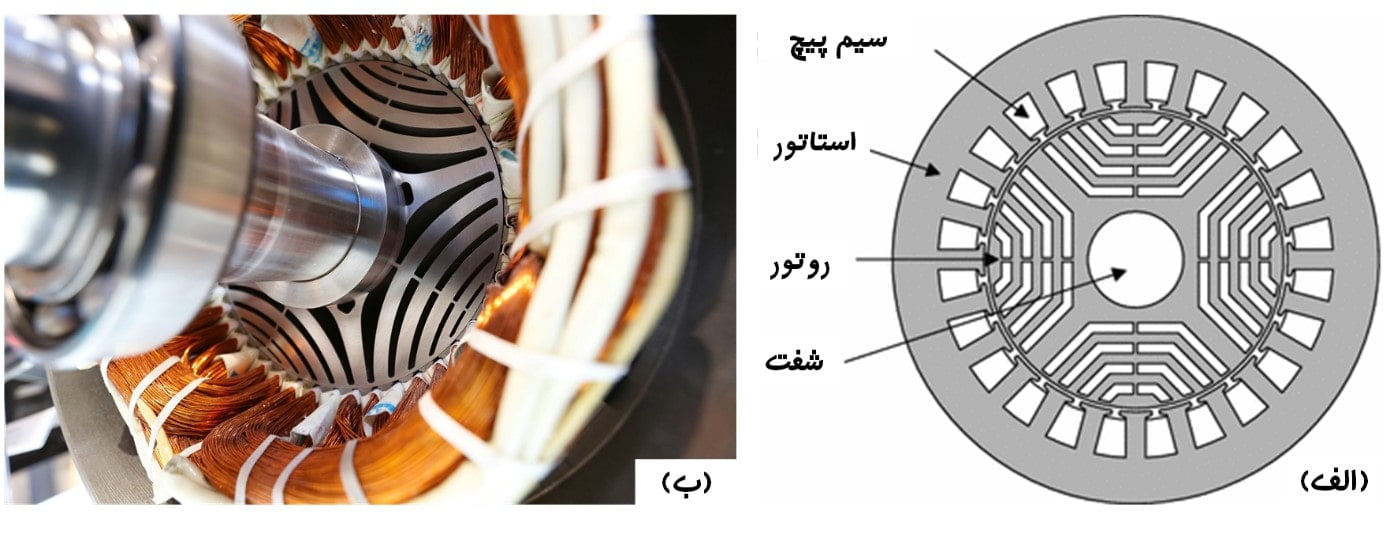
موتور سنکرون رلوکتانس چهار قطب
موتور آهنربای دائم شار سوئیچ شونده (FSPM)
موتورهای آهنربای دائم شار سوئیچ شونده دسته ای از موتورهای آهنربای دائم سنکرون هستند و توسط یک سیستم سه فاز (یا بیشتر) سینوسی تغذیه می شوند. موتورهای شار سوئیچ شونده دارای روتوری دندانه دار مانند روتور موتور سوئیچ رلوکتانس هستند که هیچ سیم بندی یا آهنربا روی آن سوار نشده است. اما در استاتور این موتورها هم سیم بندی سه فاز وجود دارد و هم آهنربای دائم که در شکل زیر قسمت الف قابل ملاحظه است. مزیت این ساختار این است که بر خلاف موتورهای آهنربای دائم دیگر که هم روتور و هم استاتور نیاز به خنک کاری دارند، موتورهای شار سوئیچ شونده تنها نیاز به خنک کاری استاتور دارند. قابل ذکر است که توپولوژی دیگری نیز برای موتورهای FSPM وجود دارد که دارای تحریک آهنربا در روتور است (شکل زیر قسمت ب). مزیت این ساختار، روتوری سبک و کاهش مسیر مغناطیسی شار اصلی است.
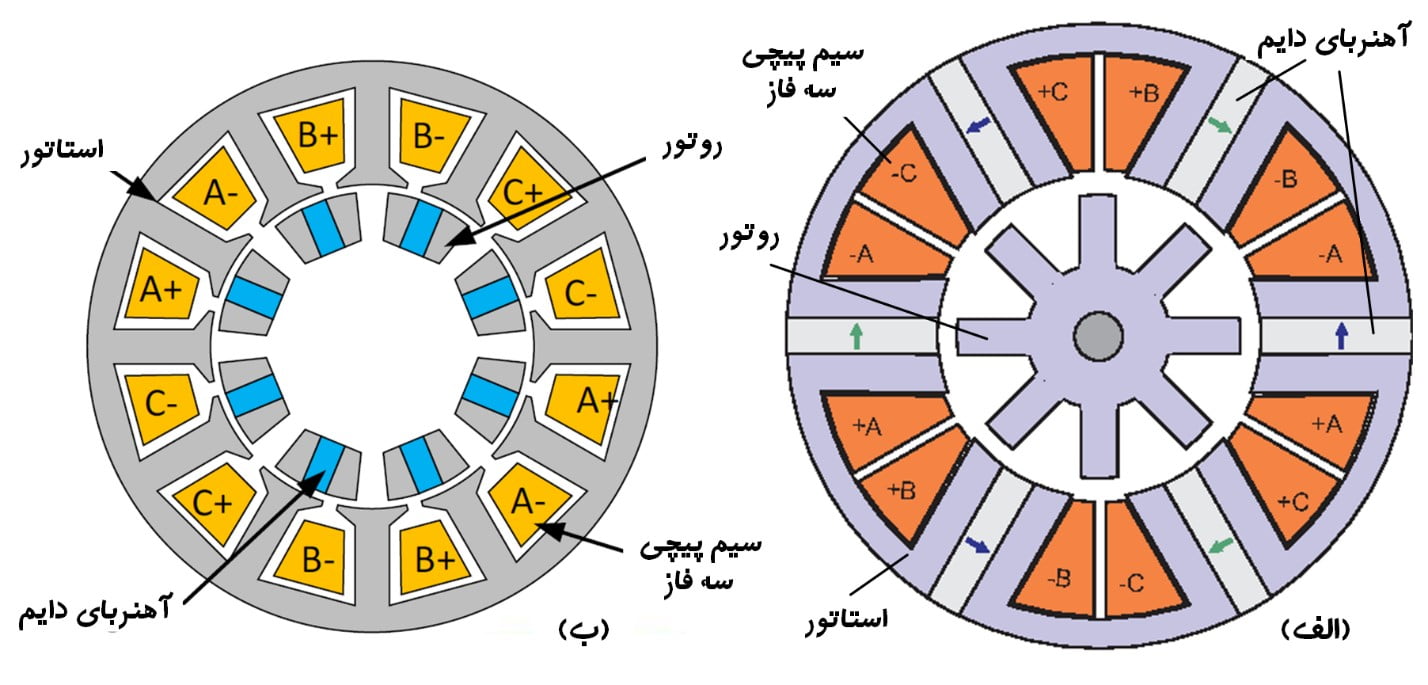
موتور شار سوئیچ شونده (FSPM) با تحریک در استاتور و روتور
ما چه موتورهایی می سازیم؟
این مجموعه قادر به طراحی و ساخت انواع موتورهای الکتریکی معرفی شده در بالا برای مصارف صنعتی و نیز سایر ماشین های الکتریکی نوین با اهداف تحقیقاتی و دانشگاهی می باشد. علاوه براین، ما قادر به ساخت انوع درایو برای کنترل سرعت موتورهای DC و AC نیز می باشیم. تعدادی از انواع موتورهای الکتریکی ساخته شده توسط این مجموعه در قسمت زیر نشان داده شده است. موتورها و درایوها در این مجموعه با توجه به مشخصاتی نظیر توان نامی، حداکثر توان کوتاه مدت، سرعت نامی، حداکثر سرعت، نوع کاربری و محیط نصب طراحی و … ساخته می شوند.
جهت ثبت سفارش و مشاوره با شماره 09117901373 تماس بگیرید و یا به صفحه تماس با ما مراجعه کنید .
- موتور BLDC با توان نامی 3 کیلووات و سرعت نامی 900 دور بر دقیقه نصب در چرخ برای موتور سیکلت برقی:

موتور BLDC برای موتور سیکلت برقی
- موتور BLDC با توان نامی 2 کیلووات و سرعت نامی 7500 دور بر دقیقه متصل به گیربکس برای موتور سیکلت برقی:

موتور BLDC متصل به گیربکس برای موتور سیکلت برقی
- موتور BLDC با توان نامی 3 کیلووات و سرعت نامی 2000 دور بر دقیقه برای تهویه گلخانه:

موتور BLDC برای تهویه گلخانه
- موتور BLDC با توان نامی 6 کیلووات و سرعت نامی 1800 دور بر دقیقه متصل به زنجیر برای موتور سیکلت برقی:

موتور BLDC متصل به زنجیر برای موتور سیکلت برقی
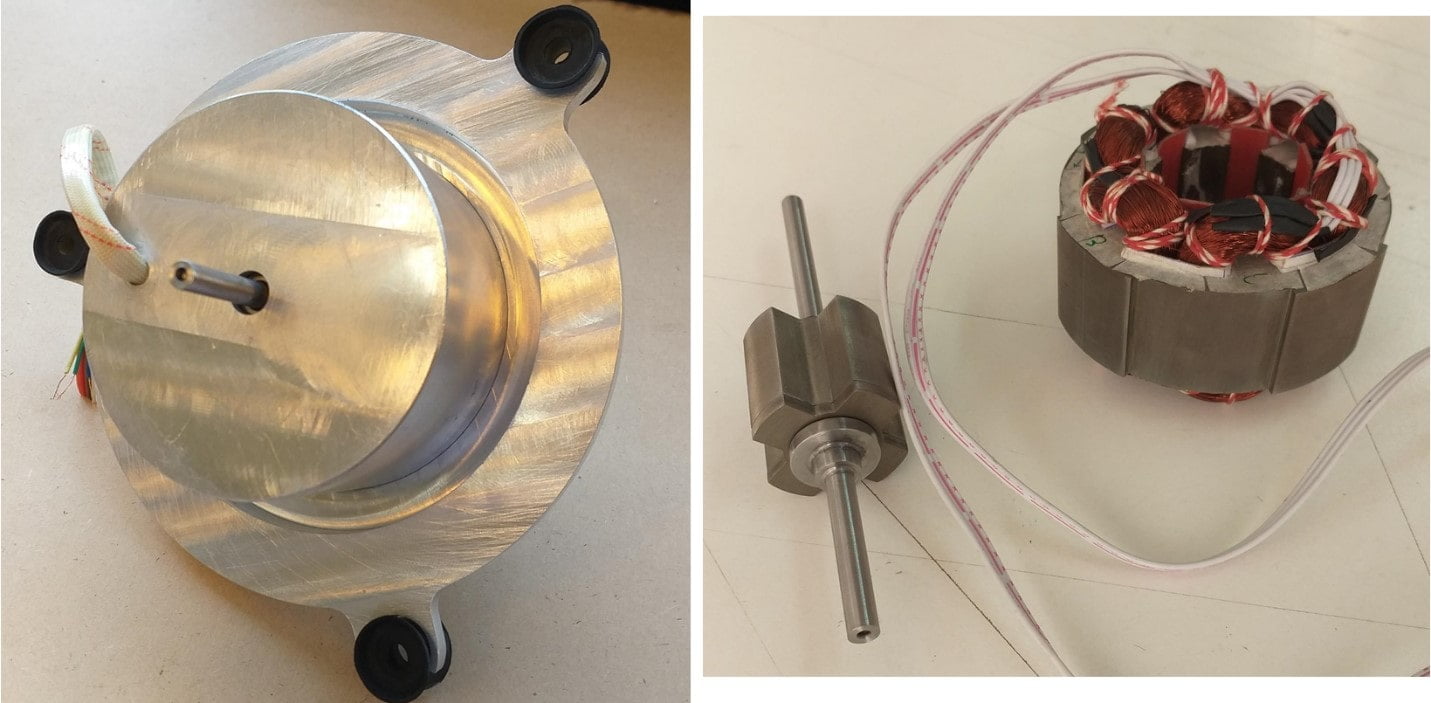
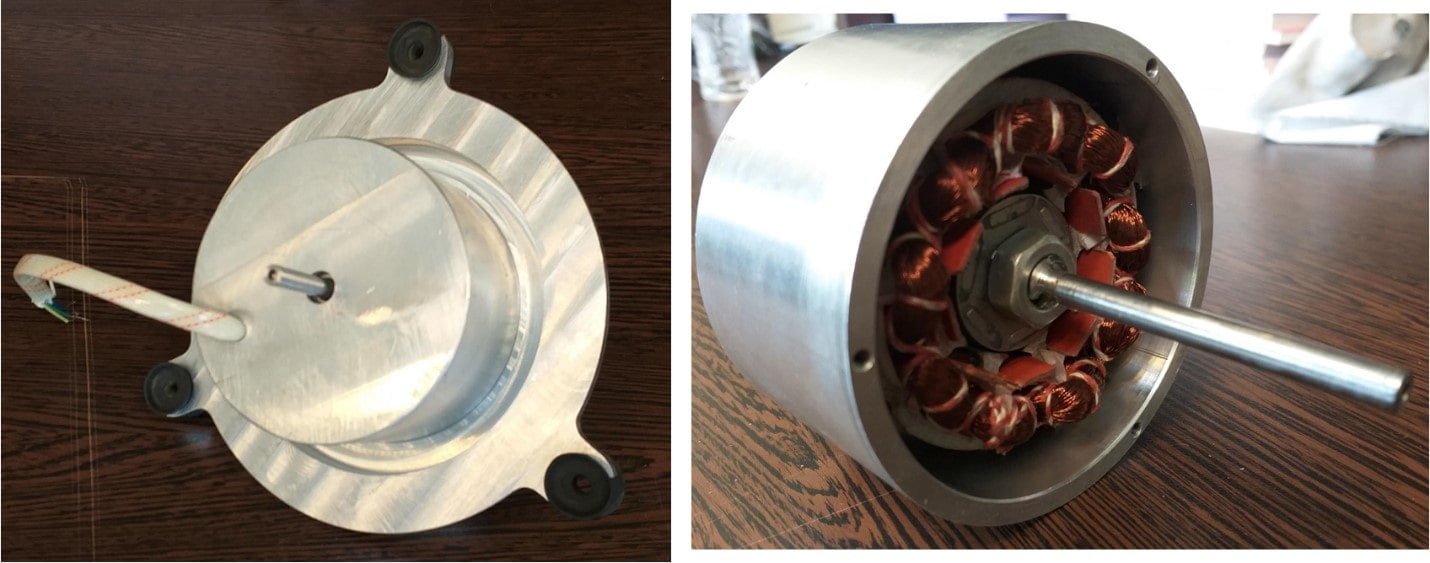
- موتور سوئیچ رلوکتانس (SRM) 50 وات 2000 دور بر دقیقه برای هود آشپزخانه:

موتور سوئیچ رلوکتانس برای هود آشپزخانه
- موتور BLDC 60 وات 2000 دور بر دقیقه برای هود آشپزخانه:

موتور BLDC 60 وات 2000 دور بر دقیقه برای هود آشپزخانه
- موتور سوئیچ رلوکتانس (SRM) 4/3 اسب (550 وات) 1500 دور بر دقیقه برای کولر آبی:




-

موتور سوئیچ رلوکتانس (SRM) برای کولر آبی
موتور BLDC 4/3 اسب (550 وات) 1500 دور بر دقیقه برای کولر آبی:

موتور BLDC برای کولر آبی
- موتور شار سوئیچ شونده (FSPM) با تحریک در روتور (تحقیقاتی):

موتور شار سوئیچ شونده (FSPM) با تحریک در روتور